深度解析医学证据,DeepEvidence为你支撑决策
摘 要
目的 探索5G远程机器人辅助解剖性肺叶/肺段切除术的安全性和可行性。方法 回顾性纳入2024年7—9月于上海市胸科医院、扬州大学附属医院与南昌大学第一附属医院完成的5G远程机器人辅助胸腔镜下解剖性肺叶/肺段切除术病例,记录并分析其围术期结局。结果 共纳入10例患者,其中解剖性肺叶切除术4例、肺段切除术6例,中位年龄61.0(56.0,72.0)岁。术中双向网络延时52.5(39.0,54.0) ms,未发生网络中断、机器人不良事件和中转开胸。患者术后中位胸腔引流量500.0(375.0,600.0)mL、中位住院时间5.5(4.0,6.0)d,未发生Clavien-DindoⅡ级以上并发症。所有患者在术后6个月内均未复发或死亡。结论 5G远程机器人辅助胸腔镜手术的安全性与稳定性较高。该技术具有良好临床应用前景,值得进一步开发与利用。
正 文
随着现代科技与外科技术的进步,手术机器人在包括泌尿外科、普外科及胸外科等领域的应用日益广泛和成熟。自2009年中国大陆首例机器人辅助下肺叶切除术开展以来,我国胸外科机器人手术技术持续发展,目前已在经济发达地区得到相当程度的普及[1]。相较于传统胸腔镜手术,机器人系统能为术者提供多方面便利,包括更佳的手术视野、高度灵活的机械臂和可消除人体生理性震颤等操作优势。多项研究[2-4]证实,机器人手术相比传统胸腔镜手术有助于缩小手术创面、减少术中出血,从而使患者获得更佳围术期结局。与此同时,机器人手术在部分复杂手术中相较腔镜手术展现明显优势。然而,受限于其高昂设备成本和较高技术门槛,机器人手术在经济相对落后地区的普及与推广仍面临困难。
远程手术有助于突破医疗资源的地域限制、提升欠发达地区医疗可及性,使偏远地区患者享受机器人手术技术的益处[5-6]。随着第5代移动通信技术(5th generation mobile communication technology,5G)的兴起和高速发展,5G网络凭借其高速率、高稳定性、低延迟的特点,有望为远程手术提供技术支持。目前,5G远程机器人手术已在胃肠外科、泌尿外科、神经外科等领域中得到临床应用[7-9]。2023年3月,本团队成功完成5G远程机器人辅助肺叶切除术的动物实验[10-11],为该技术在胸外科的临床应用奠定了基础。左庄等[12]于2024年5—10月完成5例5G远程机器人肺部手术,初步证实了该术式的可行性。本文报告5G远程机器人辅助胸腔镜下肺叶/肺段切除术病例,旨在进一步明确该技术的安全性与可行性。
1 资料与方法
1.1 临床资料
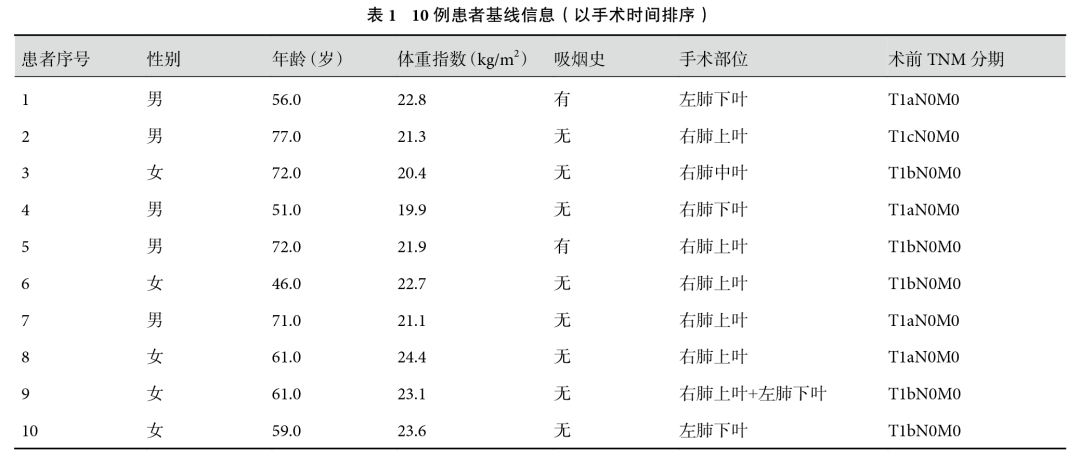
纳入2024年7—9月在上海市胸科医院、扬州大学附属医院、南昌大学第一附属医院完成的5G远程机器人辅助胸腔镜下肺叶/肺段切除术患者。所有入组患者均经上海市胸科医院团队判定为可手术切除的cT1N0M0期肺癌。排除标准包括:年龄>80岁或基础疾病严重,经多学科团队(multidisciplinary team,MDT)会诊判断手术风险过高的患者;肺功能较差难以耐受手术的患者;有既往肺部手术史、术前辅助治疗史及其他恶性肿瘤史的患者。
1.2 术前评估
所有患者均在术前完善胸部计算机断层扫描(computed tomography,CT)确定病灶范围,并在必要情况下行正电子发射计算机断层显像/计算机断层扫描(positron emission tomography/computed tomography,PET/CT)检查排除远处转移。术前常规行心电图、头颅增强磁共振(magnetic resonance imaging,MRI)、心脏超声、运动平板试验、肺功能等必要检查,以确定手术耐受性、排除相关手术禁忌证。
1.3 手术方法
手术全程使用图迈®四臂腔镜手术机器人完成,术前完成手术机器人的调试与参数调节,同时准备3D镜头、机器人无损伤抓钳、单极电钩、双极马里兰钳、机器人持针器等必要器械,并进行多次模拟演练以确保操作顺畅。机器人主操控台与床旁手术平台通过公共5G无线网络(中国电信)和 5G 客户端设备进行连接,同时手术室内副操作台与手术平台采用常规有线连接。为保障控制数据和3D影像的平稳传输,微创机器人互联互通技术团队将远程控制和5G物联网切片通讯技术结合,确保5G网络稳定传输。此外,为避免网络异常导致手术误操作,技术团队对5G手术系统进行实时网络检测,通过使用 Latency test 以 0.5 ms 为检测周期,确保及时捕捉网络异常。远程手术控制大厅与手术室之间通过在线会议平台进行实时沟通,以保证手术顺利进行。术者及现场医疗团队均具备机器人手术及独立处理术中意外事件并完成手术的资质与能力,若发生机械故障等意外则经确认后由手术助手及现场医疗团队进行中转开胸并完成手术。
患者充分麻醉后,取健侧卧位,确认单肺通气后床旁助手于第 7 肋间置入机器人镜头专用 Trocar,机械臂操作孔分别位于镜头孔两侧同一水平旁开 7~8 cm,均通过机械臂 Trocar 置入,并于第 5 肋间置入 15 mm 腔镜穿刺器作为助手辅助操作孔。手术采用 2、3、4 号机械臂进行操作,机器人手臂与 Trocar 连接完成装机后,现场术者确认手术视野清楚、机械臂操控顺畅后将机器人手术控制权切换到远程端,并在手术室内监测手术情况并随时待命。远程端主操控台确认接管操控权后手术正式开始。首先确认病灶位置,若有胸腔粘连则先行胸膜粘连松解,充分暴露胸腔内全貌并游离暴露肺门结构。若为肺叶切除术,系统性分离叶裂,并离断肺叶动脉、静脉及气管,最后沿叶裂切除肺叶,并根据切除范围系统性清扫淋巴结;若为肺段切除术,则根据病灶位置及大小决定切除范围,离断相应血管与气管结构后沿段裂切除肺段,并根据冰冻病理结果决定淋巴结清扫或采样。完成病灶切除后对血管及支气管残端进行充分止血,无菌水冲洗,试水鼓肺不漏气后放置上下2根引流管,并逐层关胸。
手术时间从麻醉完成开始开胸至关胸完成,中转开胸指由于术中突发情况或各种不可抗力因素由机器人手术转为传统开放手术,切缘由病理科术后冰冻病理界定。
1.4 术后管理
术后严密监测患者生命体征及胸腔引流量,防止术后不良事件的发生,并予常规抗炎、护胃、镇痛等治疗。建议患者术后积极咳嗽咳痰并进行呼吸训练,以预防肺不张及肺炎,并鼓励患者于术后第2 天下床活动,以预防深静脉血栓的发生。当胸腔引流量<100 mL/24 h,同时咳嗽水封瓶无漏气,予夹管1 d观察,次日若无皮下气肿及其他不良反应,可予拔管出院。术后并发症严重程度根据Clavien-Dindo分级评估。患者出院后建议待石蜡病理结果回报后门诊随访,决定是否需要进行辅助放化疗,并于术后2个月及6个月复查胸部CT,以查看术后恢复情况并排除复发。
1.5 统计学分析
采用SPSS 27.0统计软件(IBM Corporation,Armonk,NY,USA)进行统计学分析,对所有连续变量进行正态性检验,结果以中位数(上下四分位数)表示。
1.6 伦理审查
该项研究获得上海市胸科医院伦理委员会批准(批准号:IS23071),并获扬州大学附属医院伦理委员会与南昌大学第一附属医院伦理委员会批准。该研究所有流程均遵循赫尔辛基宣言。所有患者均于术前签署书面知情同意书。
2 结 果
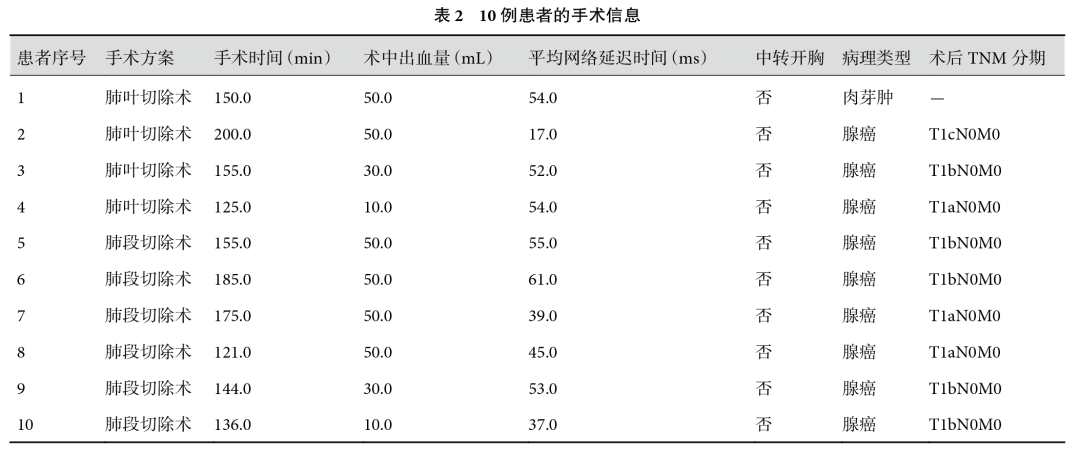
共纳入10例患者,其中男5例、女5例,中位年龄61.0(56.0,72.0)岁。10例解剖性手术中,肺叶切除术4例,肺段切除术6例;见表1~2。
10例手术中位手术时间152.5(136.0,175.0)min,术中中位出血量50.0(30.0,50.0)mL,术中冰冻病理确认所有切缘均为阴性。手术过程中术者主观感受良好,操作流畅,传输画面清晰度佳,影像、音频及操控信号传输稳定,主操作台的操作臂与手术平台的机械臂运动一致性良好,术中中位平均网络延时52.5(39.0,54.0)ms,未出现显著干扰手术进程的网络中断与机器人相关不良事件,未发生中转开胸;见表2。
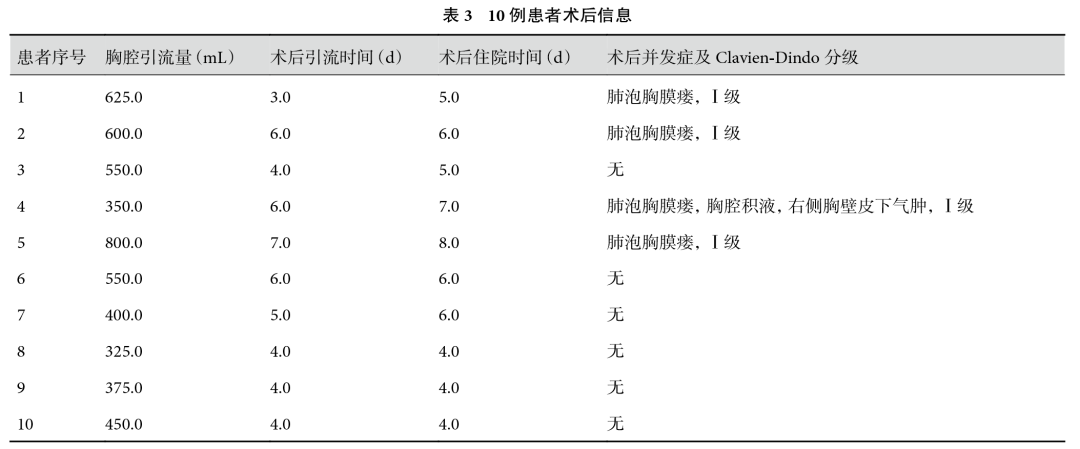
患者术后并发症发生率为40.0%(4例肺泡胸膜瘘,其中1例同时合并胸腔积液及皮下气肿,均为Clavien-DindoⅠ级),未发生需手术或ICU介入的严重并发症或围术期死亡。患者术后中位胸腔引流量500.0(375.0,600.0)mL、中位住院时间5.5(4.0,6.2)d。所有患者均未接受术后辅助放化疗,并于术后6个月进行CT复查,未见复发转移;见表3。
3 讨论
机器人远程手术概念最早提出于20世纪70年代,经过近30年的技术积累,2001年由Marescaux等[13]成功完成了全球首例跨大西洋远程腹腔镜胆囊切除术,即Lindbergh手术,首次验证了该技术的临床可行性,这也是远程外科发展史上的里程碑。此后,国内外多个团队相继开展了远程手术的研究。随着5G技术的不断发展与成熟,其超低延迟、高传输速率及高稳定性的优势进一步提升了远程手术的安全性与可靠性。目前,我国国内5G网络覆盖率已超过95%,成为该手术方式推广与普及的坚实基础。自2018年国内首例5G远程机器人动物手术顺利完成以来,该项技术已在胃肠外科、泌尿外科、神经外科等领域中相继应用与报道,其安全性与可行性已获广泛认可。然而,该技术在胸外科领域的应用十分有限[14]。
在本研究中,我院团队成功完成10例机器人辅助远程肺部手术。术者术中体验感良好,操作顺畅,机器人系统画面传输清晰稳定,未发生影响手术的网络中断或机器人相关不良事件,总体手术体验与传统机器人手术差异不大。术中中位平均网络延时为52.5 ms,处于既往研究提出的远程手术理想延迟范围内,进一步证明了5G技术的可靠性与实用性[15]。这也是继2023年3月我院团队完成该术式的动物实验后,该项技术在临床应用中取得的又一重要进展。随着通信技术的持续发展,可以预见该手术方式会有广阔的应用前景[16]。
然而,该项技术的大规模普及与应用仍面临诸多亟待解决的问题。首先,尽管5G技术能够极大保障图像的实时传输及手术机器人的操作同步性,但仍无法完全避免因网络波动导致的卡顿与影像传输延迟。为确保手术安全,可与运营商合作建立专用线路及备用连接,以保障网络稳定性。其次,机器人手术本身对术者与床旁助手的配合默契度要求极高,远程手术更是如此。这种默契的培养依赖于长期合作与手术经验积累,无法一蹴而就。因此,远程手术的开展也对现场手术团队提出了更高要求,需通过实践逐步熟悉远程术者的操作习惯,并具备独立处理术中意外事件及完成手术的资质与能力。此外,远程手术的推广有赖于手术机器人的普及。当前手术机器人购置及维护成本高昂,在经济相对落后地区短期内难以广泛覆盖。随着国产手术机器人的问世,其成本与手术费用相较于传统达芬奇机器人更可控,有望减轻患者经济负担,未来机器人手术的普及也将受益于国产机器人的进一步发展。最后,远程手术涉及多方人员协作,其顺利开展离不开远程术者、现场团队及通信运营商的紧密配合,因此相关的伦理与法律问题较复杂,目前相关立法尚不完善。为确保手术安全,远程术者及现场团队均应具备相应手术资质与能力;同时亟需建立健全法律法规,明确术中意外发生后的责任划分,以保障各方利益。
综上所述,本研究成功完成10例机器人远程肺部手术,证实该术式安全可靠,术中体验感良好,图像传输清晰、实时,操作流畅,网络稳定性高。5G远程机器人手术具有突破地域限制、提升医疗可及性、解决医疗资源分布不均的潜力,发展前景广阔。
利益冲突:无。
作者贡献:罗清泉、沈凡、田禹、黄佳负责文章构思和设计;罗清泉、黄佳、郭虹、喻本桐提供研究材料;罗清泉、黄佳、田禹负责手术实施;姜龙、黄佳负责数据收集和整理;李剑涛、沈凡负责数据分析和解释;沈凡、潘汉博、黄佳负责论文写作;罗清泉、李剑涛、姜龙负责论文修改与定稿。
参考文献略。