首页 > 医疗资讯/ 正文

摘要
背景: 智能眼镜无需额外的头眼运动即可提供实时超声图像。本研究探讨了智能眼镜联合超声检查是否能提高肌间沟臂丛神经阻滞的操作效率。
方法: 这项前瞻性随机试验纳入了151名需行肌间沟臂丛神经阻滞的上肢手术患者。四位麻醉医师接受了智能眼镜辅助(智能眼镜组)或传统(对照组)超声引导的标准化培训。主要结局是总操作时间。
结果: 五名参与者被排除,146名参与者纳入分析。与对照组相比,智能眼镜组的总穿刺时间更短(智能眼镜组:124.0 [98.0–155.5] 秒 vs 对照组:153.0 [123.0–197.5] 秒;P<0.001)。此外,智能眼镜组的超声探头成像时间优于对照组(智能眼镜组:19.0 [13.5–30.0] 秒 vs 对照组:31.0 [20.0–51.0] 秒;P<0.001),从首次皮肤穿刺到到达目标区域的时间也更短(智能眼镜组:16.0 [12.5–24.5] 秒 vs 对照组:26.0 [18.5–33.5] 秒;P<0.001)。与对照组相比,智能眼镜组的手眼协调性显著更佳,具体包括操作者头部运动次数更少(智能眼镜组:1.0 [1.0–2.0] vs 对照组:5.0 [3.0–8.0];P<0.001);针头重新定向次数更趋一致(智能眼镜组:3.00 [2.0–3.0] vs对照组: 3.0 [2.0–4.0];P=0.004)。两组的疼痛评分均保持相似的低水平,不良事件发生率无显著差异。智能眼镜组的人体工程学满意度评分(评为4或5分)更高(智能眼镜组:56.2% [41/73] vs 对照组:24.7% [18/73];P<0.001)。
结论: 与对照组相比,智能眼镜缩短了经验丰富的麻醉医师执行肌间沟臂丛神经阻滞的操作时间,并改善了他们的手眼协调性和满意度。
关键词: 手眼协调;肌间沟臂丛神经阻滞;区域麻醉;智能眼镜;超声
引言
超声引导神经阻滞已成为围术期多模式镇痛中不可或缺的一部分,可提供增强的疼痛管理、减少阿片类药物使用并加速康复。肌间沟臂丛神经阻滞已被确立为肩部和上肢外科手术区域麻醉的基石, 通过在肌间沟内浸润局部麻醉药,有效麻醉肩部、手臂以及桡侧前臂和手部区域,提供靶向镇痛。然而,传统的超声技术要求操作者保持受限的姿势以获得最佳成像。探头操作过程中过度的头眼运动常常干扰目标可视化,需要反复调整位置,从而延长操作时间并可能增加医源性风险。
智能眼镜将实时超声图像直接显示在操作者眼前,无需额外的头眼运动。这些可穿戴技术提高了儿童桡动脉置管的首次成功率,减少了穿刺过程中操作者的头部运动,并提高了区域阻滞的效率。 然而,持续的技术限制阻碍了其实际应用,包括图像延迟延长操作时间、操作者不熟悉增加主观难度,以及设备重量在长时间使用时引起鼻部和眼部不适。
先前的研究主要集中于血管通路应用(包括动脉和静脉穿刺)和模拟环境;智能眼镜在ISB中的临床效用尚未得到验证,需要通过对照试验进行严格验证。为了检验我们关于智能眼镜能提高ISB操作效率的假设,研究使用了轻量化结构、简化操作性和低延迟的智能眼镜来解决这一证据空白。
方法
感觉和运动阻滞评分
所有参与者均在手术前或手术当天接受麻醉访视。在术前访视期间,告知参与者将通过“冷试验”使用3分制评估感觉阻滞效果(0分:完全无阻滞;1分:冷感觉丧失[能感觉到触摸,但无冷感];2分:感觉丧失[无法感觉到触摸])。分别在前臂外侧、拇指掌侧、手背外侧和环指掌侧评估肌皮神经、正中神经、桡神经和尺神经的感觉阻滞。同时,评估同侧上肢这四条神经的运动阻滞,并按3分制进行评分(0 = 完全无阻滞,1 = 轻度麻痹,2 = 麻痹)。分别通过食指与拇指的对掌、小指与拇指的对掌、肘关节的屈伸以及腕关节处手指的伸展来检测正中神经、尺神经、肌皮神经和桡神经的运动阻滞。神经阻滞效果的最高综合评分为16分。
随机化和操作者
参与者通过计算机生成的序列随机分配到智能眼镜组或对照组,使用不透明的密封信封隐藏分配。四位主治麻醉医师(具有>5年超声引导神经阻滞经验)在操作前接受了标准化的智能眼镜培训。整个操作过程由独立助手录像,供评估者进行盲法结果评估,以减少观察偏倚。操作者报告的人体工程学评估和满意度指标在操作后收集。设备特性使得操作者无法设盲,但系统性地排除了人员预先知晓分配方案的情况。
智能眼镜的应用
我们使用了VRGC-V01智能眼镜,这是一种头戴式设备,设计用于显示超声成像(图1)。控制器(152 mm×102 mm×33 mm, 596 g)直接连接到智能眼镜,无需与超声机器进行物理连接。其紧凑的设计在有限空间内提供了不受限制的移动性。选用SonoSite超声高频线阵探头。无线显示适配器与SonoSite超声机连接,以160–180 ms的延迟将图像传输到眼镜。人眼感知<200 ms的延迟可忽略不计,从而实现同步显示且延迟难以察觉。该超声智能眼镜配备双0.49英寸微型OLED显示屏,以60 Hz频率投射120英寸1920×1080高清虚拟图像,对角线视野为41°,在操作者视野中的操作区域上方提供实时超声成像。眼镜重量为88克,提供可调节的近视矫正(0–500度)和五个亮度级别,以适应使用者需求。实验组配置如下:SonoSite超声机与智能眼镜之间的图像传输链路通过无线显示适配器建立,直接连接到智能眼镜的控制器初始化约需5秒,使得佩戴设备的操作者能够实时直接在眼前获取超声图像。智能眼镜的待机时长为2小时。超声侧向定位最大限度地减少了操作者的分心,同时通过眼镜保持可见性。

超声引导肌间沟臂丛神经阻滞
计划进行需行ISB的上肢手术的参与者被转移到麻醉前准备室。操作前,监测血压、心率和外周血氧饱和度(SpO₂)。将涂有耦合剂的无菌手套探头置于侧卧位的参与者身上。操作者站在手术肢体同侧,使用0.7×90 mm AN-N针在长轴超声引导下进行操作,并连续实时可视化神经周围扩散。实验组将超声屏幕置于背侧或侧向,以尽量减少操作者分心。相比之下,对照组将屏幕保持在正面位置以优化超声可视化(图2),所有其他参数在两组间保持一致。 在实时超声引导下,确认神经周围针尖位置后,分次注射0.33%罗哌卡因20 ml。动态针头重新定向确保了神经周围的环形扩散,当超声成像显示目标神经束周围出现四象限溶液分布时,定义为操作完成。
结局指标
收集每位参与者的年龄、性别、身高、体重、美国麻醉医师协会(ASA)身体状况和手术类型。主要结局从超声探头接触皮肤到完成局部麻醉药注射的时间。次要结局包括从探头接触皮肤到针头刺入皮肤的时间(T1)、从针头刺入皮肤到进入目标神经区域的时间(T2),以及针尖在超声图像上可见的持续时间(T3)。记录操作者头部的运动次数(转动>45°、伸展或屈曲的次数)。根据目标神经周围的每次浸润评估整个区域的阻滞效果,并记录为充分(定义为局部麻醉药在目标区域周围四个象限或筋膜平面内可见注射)或不充分。记录超声探头移动的次数(超声探头重新定位:探头重新捕获针头或目标神经区域)、操作过程中穿刺的次数(第一次进针计为第一次,随后回撤至少10 mm后的任何进针计为额外穿刺)。阻滞后30分钟测定感觉和运动阻滞范围,并记录阻滞相关并发症的发生率。评估ISB期间视觉模拟评分(VAS)(0–10,0 = 无不适,10 = 极度不适)。该量表使用一个无刻度的10厘米长尺。使用5分制(1–5,其中1表示最差,2表示差,3表示可接受,4表示良好,5表示最佳)记录操作者肌肉疲劳度和人体工程学评分。
样本量和统计分析
样本量确定基于最小临床重要差异方法, 使用试验前数据(对照组平均操作时间为164.8秒(标准差[SD] 43.4秒))。预设1.96个均数标准误作为临床显著性阈值,把握度90%,α=0.05,考虑到10%的脱落率,每组需要62名参与者;最初目标为124名参与者,最终纳入151名以确保统计稳健性。
所有统计方法均使用IBM SPSS Statistics 27.0(Armonk, NY, USA)进行,统计显著性设定为P<0.05。使用Shapiro–Wilk检验数据分布的正态性。除非另有说明,数据以均数(SD)或中位数(四分位距)表示。
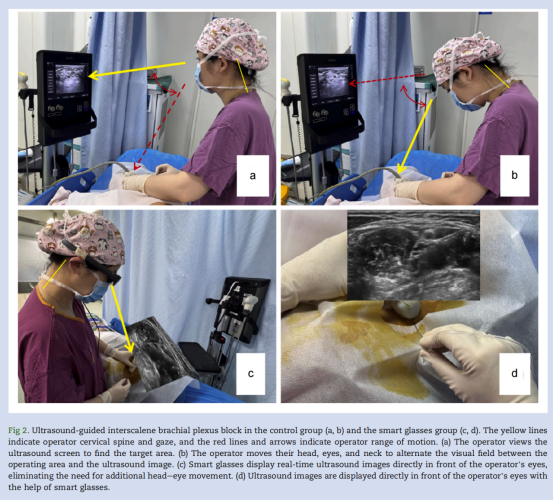
图2. 对照组(a, b)和智能眼镜组(c, d)的超声引导肌间沟臂丛神经阻滞。黄线表示操作者颈椎和视线,红线和箭头表示操作者活动范围。(a) 操作者查看超声屏幕以找到目标区域。(b) 操作者移动头部、眼睛和颈部,在操作区域和超声图像之间交替视野。(c) 智能眼镜将实时超声图像直接显示在操作者眼前,无需额外的头眼运动。(d) 在智能眼镜的帮助下,超声图像直接显示在操作者眼前。
结果
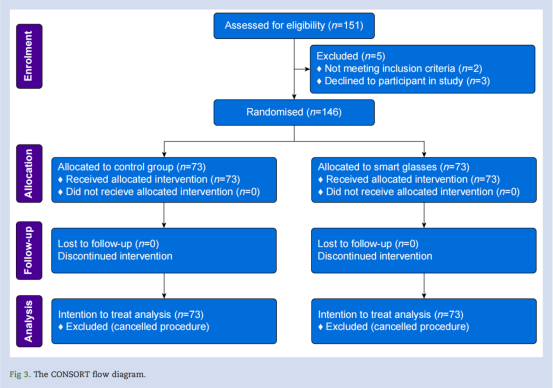
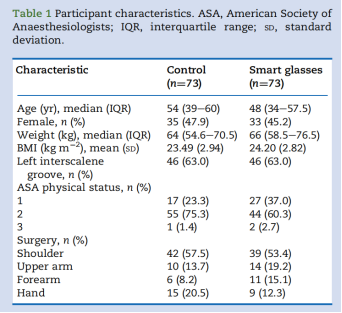
2024年11月至2025年1月期间招募了151名参与者。三名患者拒绝参与研究,2名因年龄不符合要求被排除。最终,146名合格参与者被纳入并随机分配到智能眼镜组或对照组接受ISB(图3)。无方案违背报告,无主要或次要结局数据缺失。表1总结了146名患者的基线特征。两组在年龄、性别、身高、体重、BMI、ASA身体状况、穿刺部位或手术类型方面无差异。
与对照组相比,智能眼镜组的主要结局(从探头接触皮肤到完成局部麻醉药注射的时间)显著缩短(124.0 [98.0–155.5] 秒 vs 153.0 [123.0–197.5] 秒;P<0.001)(表2)。
在次要结局中,智能眼镜组的超声探头成像时间短于对照组(19.0 [13.5–30.0] 秒 vs 31.0 [20.0–51.0] 秒;P<0.001)。从进针到定位目标区域的时间在智能眼镜组也更短(16.0 [12.5–24.5] 秒 vs 26.0 [18.5–33.5] 秒;P<0.001)。针尖在超声上的可视时间在智能眼镜组也更短(73.6 [25.2] vs 90.1 [36.4] 秒;P=0.002)。
智能眼镜组的手眼协调性更佳,体现在以下三个指标:操作者头部运动次数减少(1.00 [1.00–2.00] vs 5.00 [3.00–8.00];P<0.001),针头重新定向次数的变异性降低(3.00 [2.00–3.00] vs 3.00 [2.00–4.00];P=0.004),智能眼镜组探头移动次数低于对照组(2.00 [2.00–4.00] vs 3.00 [2.00–4.00];P=0.053),尽管最后一项差异无统计学显著性。智能眼镜组的积极人体工程学满意度(4 = 良好或5 = 最佳)更高(56.2% [41/73] vs 24.7% [18/73];P<0.001)。
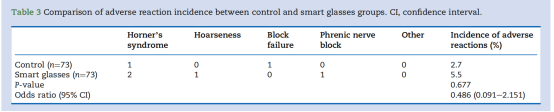
智能眼镜组与对照组之间的患者VAS评分无差异(1 [0.00–1.50] vs 1 [0.00–2.00];P=0.904),操作后30分钟,两组的阻滞评分无差异(12 [10.00–14.00] vs 12 [10.00–14.00];P=0.163)。智能眼镜组与对照组之间的并发症发生率无显著差异(5.5% [4/73] vs 2.7% [2/73];P=0.677;比值比 0.486;95% 置信区间 0.091–2.151)(表3)。

讨论
所有操作者均成功完成了肌间沟阻滞,局部麻醉药扩散充分。本研究主要发现与传统超声相比,智能眼镜联合超声显著缩短了ISB的操作时间。这些发现与Prakora及其同事的研究结果一致。从超声探头接触到首次皮肤穿刺的间隔(T1)、从首次皮肤穿刺到进入目标区域的间隔(T2)以及针尖在超声图像上可见的持续时间(T3)在智能眼镜组均显著短于对照组。智能眼镜有助于减少目标区域超声成像和操作过程中观察针尖的时间。
在操作者和参与者的舒适度及满意度评分。智能眼镜组的人体工程学评分和积极评价均高于对照组,这与Jang及其同事的发现一致。两组在患者VAS评分和30分钟时的3分制评分上无显著差异。这一发现可能反映了不可避免的操作不适,主要集中在进针和局部麻醉药肿胀感。在标准化的罗哌卡因方案下,神经阻滞的效果取决于目标筋膜平面内环形麻醉药的分布。所有肌间沟臂丛神经阻滞均由经验丰富的麻醉医师执行。未来考虑使用智能眼镜指导不同培训水平的神经阻滞是一个可行的方向。关于并发症,组间未观察到显著差异,可能是因为我们的样本量不足以评估此结局。因此,未来的研究需要计算并扩大样本量以评估并发症的发生率。
智能眼镜组中纳入了三个手眼协调性指标。操作者头部运动次数和穿刺次数显著少于对照组,具有统计学差异。相比之下,智能眼镜组的探头移动次数少于对照组,但无统计学差异;可以理解的经验丰富的操作者可能优先将针尖调整作为其主要视觉优化技术。无意识的超声探头移动是手眼协调性差的表现,在经验不足的麻醉医师中更常见,他们使用超声探头寻找针头,导致目标神经视野丢失,并迫使进一步有意移动探头以重新成像目标区域。为解决这一挑战,智能眼镜可以通过减少操作时间和头部运动来改善手眼协调性和人体工程学,从而提供更舒适的操作者体验,这应适用于其他区域阻滞和床旁穿刺。
本研究的几个显著优势值得一提。首先,这是首次尝试将智能眼镜与超声结合用于ISB,为未来智能眼镜在其他神经阻滞中的应用提供了范例。其次,与先前的头戴式设备相比,智能眼镜显示出优势。集成的0–500度屈光矫正和五级亮度调节确保与矫正眼镜使用者的兼容性。与最近需要有线连接传统超声机的智能眼镜应用研究不同,本研究中使用的智能眼镜集成了无线显示适配器。无需物理约束直接将超声图像投射到显示器上,显著增强了临床检查过程中操作者的移动性。由于其轻量化结构,智能眼镜还表现出卓越的便携性,提高了临床使用中的人体工程学舒适度。 与先前因效率低下、人体工程学限制和临床显著延迟而受限的头戴式设备相比,该智能眼镜系统减轻了阻碍可穿戴超声显示器临床实施的技术限制。
研究也有一些局限性。首先,智能眼镜虽然轻便(88克),但比普通屈光眼镜(25–50克)稍重,长时间佩戴可能导致颈部和鼻子酸痛。其次,智能眼镜的屈光调节范围为0–500度,但有些临床医生的近视超过500度,在普通屈光眼镜上再佩戴智能眼镜可能会引起不适,限制了智能眼镜的推广。第三,操作者在操作过程中未设盲,可能因设备的明显差异而在评估人体工程学评分时产生偏倚。第四,该技术尚未在全球广泛普及,可能限制试验验证的补充数据的可用性。
总之,与传统超声系统相比,经验丰富的麻醉医师在使用智能眼镜进行超声引导ISB时实现了更优的操作效率。智能眼镜的集成通过增强手眼协调性显著缩短了操作时间,从而提高了操作者的人体工程学满意度。智能眼镜在ISB中的临床可行性和操作优势为其在周围神经阻滞技术和床旁有创操作中的应用建立了令人信服的理论基础。 这一转变符合日益增长的以患者为中心的创新需求,这些创新既能提高操作安全性,又能改善临床医生的人体工程学。
骨麻征途 点评
智能穿戴设备在未来临床麻醉中将会发生翻天覆地的革新,根据本研究关于智能眼镜辅助肌间沟臂丛神经阻滞的随机临床试验综合分析:
一、对未来临床前景的影响
1.技术推广潜力 未来可拓展至其他神经阻滞术,智能眼镜可显著提升操作效率与手眼协调性,解决了以往头戴设备效率低下、人体工程学限制和临床延迟等技术难题,为未来应用提供理论依据,甚至可优化床旁有创操作如中心静脉穿刺、动脉置管等场景,可能成为未来超声操作的新范式。
2.临床培训与教学革新 智能眼镜可实时将超声影像投射至术者或分屏至其他人视野,有望成为麻醉科医师培训的创新工具。
3.推动精准医疗及临床效益 通过减少操作时间(主结局:124.0 s vs 153.0 s,P<0.001)和头颈运动次数(1.0次 vs 5.0次),总穿刺时间缩短(较对照组减少约29秒(19%)),关键步骤加速等,可显著提升手术室效率,符合加速康复外科理念。
二、当前存在的局限性
1.硬件舒适度不足 重量显著高于普通眼镜,佩戴体验或许带来不适,但未来完全有空间优化。
2.研究设计局限 a.非盲法设计:术者知晓分组可能引入主观偏倚;b.非正态数据处理未详细说明:虽然提到了使用Shapiro-Wilk检验,但未具体说明如果数据不符合正态分布,将采用何种非参数检验方法,这可能影响结果的解释;c.样本量不足:在次要结局方面,统计功效可能不足,限制了对并发症发生率的结论。
三、总结与展望
智能眼镜通过整合实时超声影像与术者视野,为未来区域麻醉技术升级提供了新方向。同时为制造商和研究人员提供了具体的改进方向,通过硬件轻量化、适应性扩展及大样本研究进一步解决现有局限,实现向广泛临床应用的转化。
- 搜索
-
- 1000℃Nutrients:真实世界数据,纤维肌痛患者的饮食与运动自适应规律
- 1000℃D-二聚体升高诊治与管理专家共识(2026)
- 1000℃专家论坛|文良志:门静脉血栓的诊断和治疗
- 1000℃首例儿童NF2驱动型胸膜间皮瘤,多方法学检测锁定NF2双等位基因失活和14/22号染色体缺失,提示与成人胸膜间皮瘤不同
- 1000℃打破误区:干扰素追求CHB功能性治愈,HBsAg为何“不降反增”?
- 1000℃迷惑性极强的肝内病灶!影像表现疑点重重,最终病理竟查出两种不同肝脏恶性肿瘤
- 1000℃指南共识|原发性肝癌分子靶向药物相关蛋白尿中西医结合诊疗专家共识
- 1000℃Diabetologia:意大利北部社区 1~100 岁人群胰岛自身抗体与乳糜泻 TGA-IgA 的年龄分布及检测方法学验证
- 精J Child Psychol Psychiatry:12种罕见神经发育障碍儿童沟通能力谱系
- 精研究发现:爱吃辣的人,心血管病和癌症死亡风险都会显著降低
- 精Nursing in Critical Care:别再指责护士了!ICU 里被遗漏的护理,根源在系统而非个人
- 精Acta Obstet Gynecol Scand:罕见病女性的妊娠并发症与母婴结局,一项单中心434种罕见病的回顾性队列研究
- 精【爱儿小醉】儿科患者术前对流层臭氧暴露与围手术期呼吸系统不良事件之间的关系:一项单中心回顾性队列研究
- 精eBioMedicine:牙龈下微生物组与脑健康存在连续关联梯度,牙周炎或成认知衰退可干预靶点
- 精军事医学研究院《自然·通讯》:自适应IrPtCu纳米酶水凝胶实现耐药菌感染伤口序贯治疗
- 精能够逆转萎缩性胃炎的两个中成药,该怎么选择?
- 荐同时性多发性原发性肺癌,左右病灶分别为EGFR和ALK阳性,考虑淋巴结肿大仅局限左肺门及血浆EGFR阳性,采用奥希替尼联合化疗
- 荐40岁女性同时罹患卵巢支持细胞-间质细胞瘤和透明细胞乳头状肾肿瘤,WES等基因检测竟为阴性
- 荐椎管内麻醉使用止血药突发气道痉挛的抢救流程解析
- 荐女子肝区无任何不适,影像提示复杂囊性病变,层层鉴别后锁定罕见胆管源性囊性肿瘤
- 荐“绘”真报告 | 病理考虑为中枢神经细胞瘤,检出脑室外神经细胞瘤的特征性变异FGFR1-TACC1融合,辅助鉴别诊断
- 荐8岁女童出现男性化症状,竟是形似「性索-间质肿瘤」的卵巢「无性细胞瘤」所致,少见KRAS/CDK4共扩增或与侵袭性有关
- 荐17例病例分析揭示常见于中年人的色素性室管膜瘤临床特征与预后,分子检测可助力临床精准诊疗
- 荐Lancet Oncol:结直肠癌腹膜转移,围手术期化疗并非必选项
- 标签列表
-
- 星座 (702)
- 孩子 (526)
- 恋爱 (505)
- 婴儿车 (390)
- 宝宝 (328)
- 狮子座 (313)
- 金牛座 (313)
- 摩羯座 (302)
- 白羊座 (301)
- 天蝎座 (294)
- 巨蟹座 (289)
- 双子座 (289)
- 处女座 (285)
- 天秤座 (276)
- 双鱼座 (268)
- 婴儿 (265)
- 水瓶座 (260)
- 射手座 (239)
- 不完美妈妈 (173)
- 跳槽那些事儿 (168)
- baby (140)
- 女婴 (132)
- 生肖 (129)
- 女儿 (129)
- 民警 (127)
- 狮子 (105)
- NBA (101)
- 家长 (97)
- 怀孕 (95)
- 儿童 (93)
- 交警 (89)
- 孕妇 (77)
- 儿子 (75)
- Angelababy (74)
- 父母 (74)
- 幼儿园 (73)
- 医院 (69)
- 童车 (66)
- 女子 (60)
- 郑州 (58)