首页 > 医疗资讯/ 正文
近年来,采用机器人技术的辅助手术系统在骨科、腹腔及微创手术等领域的应用日渐成为新趋势。其中,腹腔内窥镜系统(RALS)采用主从式操作模式,融合机械臂控制与内窥镜成像系统,显著提升了手术安全性和微创效果。该系统具有以下优势:
机械臂可替代术者手部完成操作,部分系统还支持远程手术功能,有助于解决医疗资源配置不均和特殊场景的远程控制等问题;同时,术中机械臂操作稳定性优于人手,通过调整不同的主从力控映射比,可弱化术者因手部震颤等不利因素造成的器械抖动,进一步减少非预期创伤;此外,基于双目内窥镜成像技术提供的三维手术视野,显著改善了术野可视化程度,既提升了操作便利性,又降低了手术风险[1-9]。
然而,RALS在带来技术优势的同时也引入了未知风险。在时间延迟方面,术中术者仅通过主手操控台操作,对从手状态的感知仅凭借力反馈、影像反馈及护士传递信息,当出现影像或操作延迟过高时,可能导致术者对腹腔内状况判断失误。与传统腹腔镜手术不同,RALS术者难以区分延迟来源(影像传输或机械臂响应),且无法通过触觉反馈进行补偿。此外,传统手术中术者可通过调整站位、姿势等方式改变工作空间以适应需求,而RALS术中需通过主从离合短暂断开对从手的控制,调整主手空间后再恢复映射,对其可用性与安全性构成了新的挑战。
全球医用机器人领域的标准化建设呈现“国际标准转化与本土标准创新”并行的格局,目前在国际范围内,针对医用机器人领域的标准化工作尚处于起步阶段,而我国已处于引领地位。针对国际标准,目前我国已完成IEC 80601-2-77:2019、IEC 80601-2-78:2019的转化,ISO 5363:2024的转化也正在开展中。
为规范行业发展,我国已发布7项手术机器人相关行业标准。2024年发布的YY/T 1941-2024《采用机器人技术的腹腔内窥镜手术系统》标准首次基于安全性和质量评价规范了RALS相关设备/系统的技术要求,包括远心不动点精度、主从操作准确性、重复性、系统延迟、制动距离、安全保护等关键指标,为产品验证、临床使用安全等提供了技术保障。本文将从检验过程中的注意事项及指标参数的临床意义等方面对标准中的核心指标进行解读,探讨其在生产、质量控制及实际临床应用中的指导价值。
1 标准适用范围解读
YY/T 1941-2024《采用机器人技术的腹腔内窥镜手术系统》是我国首个针对医用主从式机器人制定的产品标准。该标准适用于RALS以及通过交互条件和接口条件连接的机器人手术器械。RALS为三类有源医疗器械,在《医疗器械分类目录》中归属于01有源手术器械(一级分类),07手术导航、控制系统(二级分类),03手术控制系统(三级分类)。
截至2025年5月,国家药品监督管理局官网数据显示,我国已有14个RALS产品获批上市,涉及近10家国内生产厂商及代理公司。目前,RALS在临床上的应用主要集中于泌尿外科、普通外科、妇科等腹腔手术领域。本标准结合腹腔手术的临床特点,系统评估了RALS在应用过程中可能存在的风险,并针对性制定了性能要求和试验方法[10],旨在规范产品质量、保障手术安全性和有效性。
2 术语和定义解读
2.1 采用机器人技术的腹腔内窥镜手术系统
本标准在“3术语和定义”章节中引用了GB 9706.1-2020、YY/T 1712-2021、YY/T 1686-2024、YY 9706.277-2023[11-16]界定的术语和定义,并新增了包括采用机器人技术的腹腔内窥镜手术系统、手动控制器参考点、远心不动点、手术运动、摆位运动等12个专用术语。这些新增术语主要基于以下两方面考虑:
一是针对产品组成特点,便于标准理解;二是基于产品性能检测的特殊需求。
通过对国内已获批的14个RALS产品的统计分析,该系统通常由医生控制台、患者手术平台、影像处理平台及三维腹腔内窥镜(简称内窥镜)、手术器械四部分组成。这些组件通过内窥镜进行查看,以主从控制的方式控制手术器械进行操作。据此,本标准明确定义“采用机器人技术的腹腔内窥镜手术系统是指通过主从操作方式控制机器人手术器械和/或内窥镜,同时利用内窥镜进行可视化观察的设备/系统”。
2.2 手动控制器参考点
在系统测试过程中,主手控制端的位姿直接影响测试结果。为确保试验的可重复性,需要建立统一的主手姿态描述方法。考虑到主手控制器存在夹钳式、笔式、球形、手柄式等多种形态,本标准定义“手动控制器参考点是指由制造商定义的、能够表征术中医生手部位姿操作信息的参考点”。该参考点应与从手的末端参考点建立映射关系,制造商在试验方法中应标记到具体点,以保证测量结果的客观性及试验的可重复性。
2.3 远心不动点
在腹腔手术中,需通过穿刺针(trocar)穿透体表组织(如腹壁),建立内窥镜及手术器械进入体内的通道,穿刺后留下的孔道即称为“戳卡孔”。若对从手设备的运动缺乏合理约束,极易对戳卡孔附近的组织造成不必要的损伤,甚至扩大创口,直接影响手术安全性及术后康复。因此,需明确定义用于表达戳卡孔附近从手设备运动约束的指标,以保障设备在术中正常发挥作用以及手术的顺利进行。
本标准定义“远心不动点是指RALS设备上的虚拟点,通过软件或机械约束的方式使RALS的一部分被限制围绕该点旋转或沿轴向平移”。值得注意的是,由于实际手术中末端执行器的刺入深度可能发生变化,该点并非固定不变,而是可根据手术需求动态调整的虚拟点,本标准中给出的这一术语是对该虚拟约束点的概念化表述。
2.4 手术运动及摆位运动
手术过程中从手器械操作臂会通过主从操作的方式进行运动,部分系统在调整机械臂位置时也采用摆位控制。由于这两种模式下的风险不同,针对这两种运动模式制造商应分别考虑并设计保护措施,为此本标准对这两种模式进行术语层面的区分。该模式下术者可获得力反馈或限位保护,并可通过影像系统辅助操作。手术运动是指预期在手术操作过程中发生的,以控制机器人手术器械和/或内窥镜位姿为目的的主从操作运动。摆位运动是指为调整机械臂机械接口位姿而执行的自主运动或术者控制的连续运动。该模式下术者仅能依靠视觉信息判断机械臂运动状态。
3 要求及试验方法解读
本标准中对系统的要求包括手动控制器性能、器械操作臂性能、系统操作性能、安全保护功能、机器人手术器械、软件6个部分,详见图1。标准的整体架构还充分考虑到性能要求、机械安全、功能安全等临床问题,且设备应具有必要的保护功能。
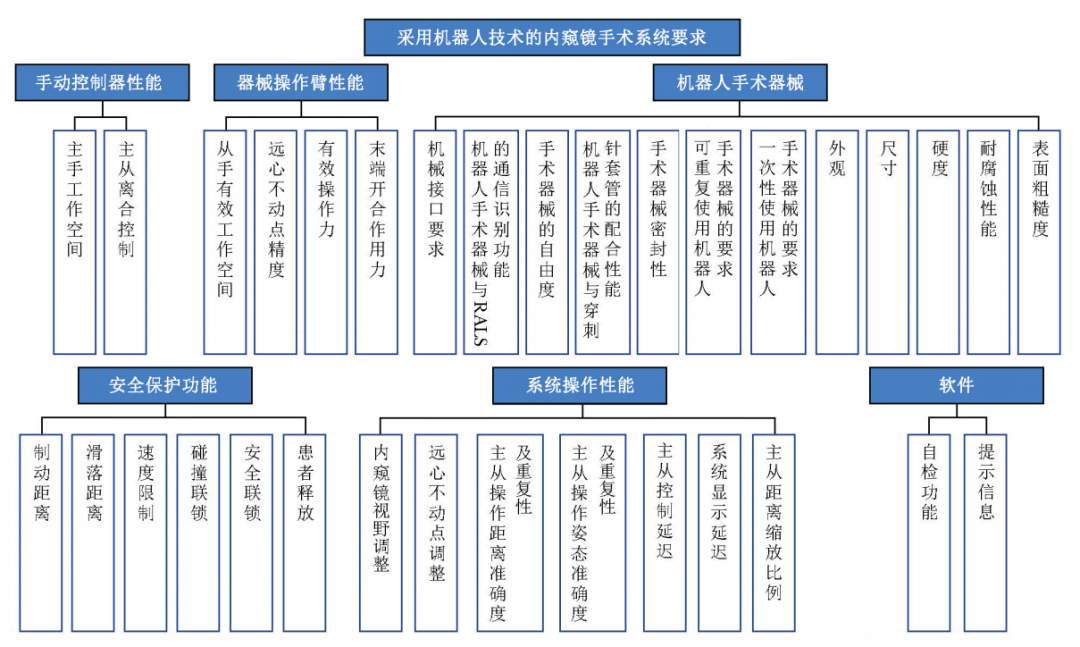
图1 采用机器人技术的内窥镜手术系统要求
RALS:腹腔内窥镜系统
3.1 手动控制器性能
在RALS中,手动控制器(主手)作为重要组成部分之一,其性能直接关系到手术的顺利进行和操作准确性。除关注患者端的机械臂性能外,本标准针对RALS产品特点,首次对医生端的主手工作空间进行明确规定。这一要求的必要性体现在手动控制器必须能够在制造商规定的工作空间内自如、顺畅地移动,若手术空间不足则会导致手术误操作或无法到达目标位置,进而影响手术效果,增加医生操作难度。主手操作位置直接影响有效工作空间的系统性能表现。
为确保手动控制器能在规定工作空间内正常运作,在测试环节需充分考虑最不利情况:应选定手动控制器上的标准参考点,使该参考点经过制造商定义的工作空间六面体的所有顶点,以验证控制器在极限空间内的移动能力和功能完整性,确保其在实际手术中的空间适应能力,有效预防因空间限制导致的操作故障。
工作空间与主从离合控制需综合考量。术中主从映射比差异会导致主手所需移动距离与从手不同,主手工作空间可能无法支撑从手的单次运动。此时,需断开主从离合控制以复位主手,再重新连接进行操控,这正是设置主动开启主从离合的意义所在。主从离合状态以及断开或连接主从控制的过程应有明确的视觉(如指示灯)或听觉(如提示音)提示,以避免操作失误,确保手术安全。
3.2 器械操作臂性能
器械操作臂作为直接与患者接触的从端应用部分,其性能参数直接影响临床手术的安全性及有效性。制造商必须明确规定从手操作臂的最大活动范围,以确保在实际手术过程中能够完全覆盖患者的手术区域。值得注意的是,在该工作范围内的任意点位,器械操作臂均应保持功能与性能的符合性,在准确度、重复性等性能检测中需特别关注边缘区域的性能表现,避免因范围边界处的性能衰减影响手术操作。
远心不动点精度是从手操作臂的关键性能指标之一。实际手术环境中,末端手术器械需在工作空间内以各种姿态移动,为了对各种极端情况进行模拟,远心不动点精度测试时需在两个接近垂直的轴线上移动机械臂,最终以参考点轨迹的最小包络球半径作为精度指标。通常情况下,远心不动点应稳定在戳卡孔附近,活动范围越小,对创口的牵拉损伤风险越低,有利于患者术后康复,减少术后并发症的发生。远心不动点精度制定时应考虑戳卡孔直径和器械杆直径,基于常规戳卡孔(12 mm)和器械杆(5~8 mm)尺寸,建议精度控制在6 mm以内。
除精度外,器械操作臂的操作力也是关键性能之一。器械操作臂的有效操作力决定了系统在人体内的移动能力。本条款要求的实质是确保器械臂在体内操作过程中,能够抵御可预期的组织阻力而不发生功能失效,保障手术操作的连续性与稳定性。方法中充分考虑了X、Y、Z三轴正负方向(共6个方向)的操作能力,要求器械臂插入深度至少2/3,以模拟术中较不利情况下的力臂长度。
基于YY/T 1712-2021标准,本标准对末端器械(如持针钳、抓取钳等)的转动力矩要求进行了细化,将其细分为图2(图片来源为标准YY/T 1941-2024)中F2和F3两种力。其中,F2为YY/T 1712-2021中已规定的平行于钳头方向的力,确保缝合针不发生齿位滑脱;F3为新增的垂直于钳头方向的力,要求器械不发生形变或脱落。需强调的是,制造商必须明确标注测试条件,包括被夹持物参数、夹持位置以及最小施力值。制造商在生产时应重点验证这些参数是否符合实际临床需求,确保手术器械的适用性与可靠性。本标准的上述规定为器械性能评价提供了客观依据,有助于提升手术安全性和操作效果。
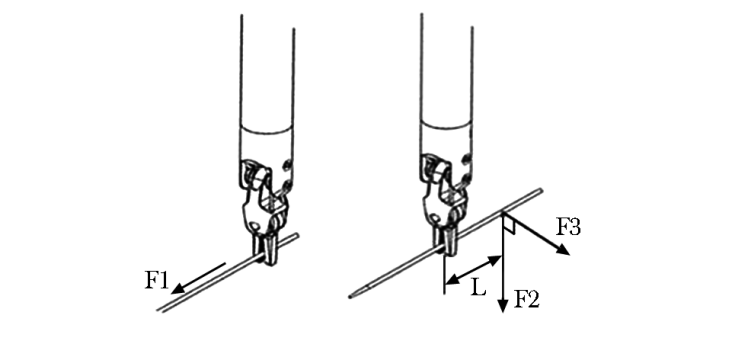
图2 末端加持力及转动力矩示意图
3.3 系统操作性能
RALS的整体操作性能评估需综合考察各组件间的协同工作能力,重点验证包括内窥镜视野调整、远心不动点调整、主从距离缩放比例调整在内的3个核心功能,应通过实际操作检查确认有无。性能检验包括主从操作距离准确度及重复性、主从操作姿态准确度及重复性、主从控制延迟以及系统显示延迟,从风险管控角度可分为操作精度和链路延迟两部分(图3)。
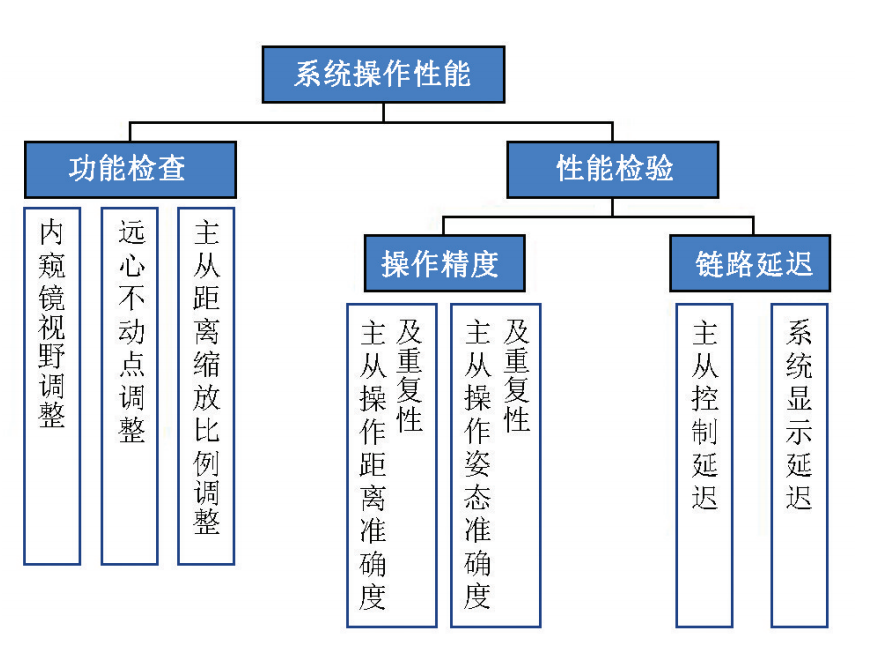
图3 系统操作性能
类似主手部分和从手部分的测试要求,在测试系统操作精度时也应充分考虑工作空间边界可能存在的风险。主从操作距离准确度和重复性测试时主手控制器应沿工作空间六面体的4条对角线移动。建立主从手参考点基准坐标系,根据主手控制器末端参考点的位移计算距离,再乘以主从手映射比例,可得到从手参考点位移,对比理论值与实际值计算误差。
与YY/T 1712-2021中的该条款不同,YY/T 1941-2024中额外考虑了主从操作距离精度百分比(主从操作距离准确度/实际从端移动距离)。考虑到用于不同手术的RALS从手常用行程不统一,该指标可用于反映主从操作距离误差占从手移动距离的比例,为制造商评估风险提供新依据。测试中以主手端的移动作为定量,考虑到从手移动距离受主从映射比例影响,本条款的测试需至少在最大和最小主从映射比例下进行。
姿态精度测试也需选取工作空间立方体的8个顶点作为不利点,测试8种不同姿态,其中任意2个姿态变化间旋转轴角变化应>15°,且需通过≥2个姿态驱动轴实现姿态转换,详见图4(图片来源为标准YY/T 1941-2024)。不同姿态测试可充分模拟术中复杂操作场景,以验证产品在不同术式以及不同器械操作下姿态的符合性。
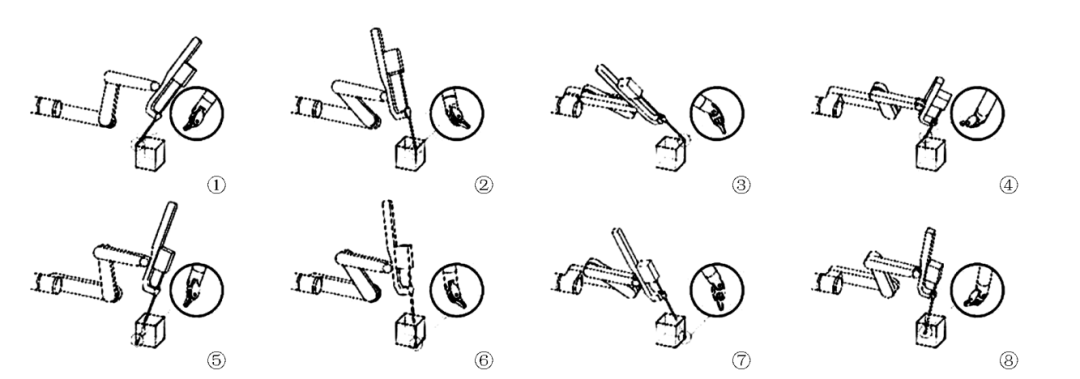
图4 探测范围测试示意图
RALS中的操作链路可简化为“初操作-运动-成像-显示-再次操作”,主从控制延迟考虑到术者进行主手操作到从手器械响应运动过程中的延迟(包括启动延迟、跟随延迟和停止延迟),制造商应综合考虑存在的风险。另外,标准考虑到机械臂存在如平行四边形机构、球形机构、弧形机构等构型差异,要求在X、Y、Z三个轴向的正负方向上移动时分别进行测试。
系统显示延迟覆盖了从运动到显示的链路延迟,利用示波器连接2个光电传感器分别检测1个可控光源和RALS显示屏,从示波器收到光源的点亮信号,到显示屏上显示内窥镜看到的光源影像并转化为信号的时间差记为显示延迟。在现有的RALS产品中,显示系统可分为开放式与封闭式两类。开放式显示系统(如显示器)通常仅呈现单个画面,而封闭式显示系统(如虚拟现实技术、裸眼3D)则一般接收两路图像信号,对于后者,标准中额外定义了左右两路图像延时差,即两路信号延迟的差值;两路延时的平均值则记为封闭式显示系统的系统总图像延迟。总图像延迟直接影响操作即时性,若延迟过高,可能导致手术中操作过量,进而对患者造成额外损伤或并发症;左右两路延时差过大则会引发重影,增加术者的生理与心理负荷。从人体工效学角度出发,两类延时均需得到有效控制,以保障手术安全性与操作舒适性。
3.4 安全保护功能
3.4.1 急停后末端位移
在RALS的临床应用中,安全性保障与操作精准性、实时性同等重要。急停装置是医用机器人手术系统中的安全保障措施之一,可避免意外损伤发生,而急停后末端位移是评估系统控制能力的重要指标。其主要受以下3个因素的影响:
1 机械臂构型:由于手术器械操作杆的特殊设计需求,其长度通常较长,导致急停时末端易产生弹性形变引发抖动。标准要求试验应采用最长的手术器械,并以器械最远端作为参考点进行测试[17-18]。值得注意的是,部分机械臂在完全断电时可能出现滑落现象,这会显著增加急停后末端位移,制造商需对此类风险进行充分评估和控制;
2 运动方向:标准要求对X、Y、Z三个轴向的正负方向均进行测试,确保各方向运动的安全性;
3 运动速度:测试应在术者可操作的最大运动速度下进行,并对X、Y、Z三个轴向的正负方向均进行测试,以评估最坏情况下的风险控制能力。
3.4.2 特殊情况下的制动要求
根据YY 9706.277-2023《采用机器人技术的辅助手术设备的基本安全和基本性能专用要求》附录CC中对急停的增补,标准考虑到在静止状态下,如发生网电源断开、急停触发或术者离开操作位时可能导致器械操作臂下坠,应按照制动距离测试方法进行检测,具体以参考点从急停触发到完全停稳的运动轨迹中最大两点间距作为制动距离。
3.4.3 运动速度的安全控制
除急停情况外,在主手失控(如误触或控制柄滑脱)时,末端手术器械应以不超过制造商规定的最大线速度运行,以确保风险可控。制造商应根据不同手术阶段的特点设定差异化的最大线速度限制,并在产品设计阶段进行充分的风险分析。测试时应分别评估主从操作和电动摆位模式下机械臂末端参考点的移动速度是否会超过制造商规定。
3.4.4 碰撞保护功能的设计考量
机械臂碰撞保护功能要求机械臂在受到非预期碰撞时应立即停止运动。考虑到主从操作模式下,术者可借助力反馈等信息判断碰撞情况,而摆位运动模式下则仅能依靠视觉观察,因此,制造商应针对不同模式设置合理的碰撞力阈值,在确保安全性的同时避免因阈值过低影响系统正常工作。
本标准对RALS系统提出了全面的安全性要求,除上述内容外,还对器械、接口和软件等性能有详细规定且较为直观,可参考各个器械标准要求,本解读中不再赘述。
4 标准实施解读与讨论
2024年9月29日,国家药品监督管理局正式发布YY/T 1941-2024标准,该标准将于2025年10月15日起实施。作为我国首个针对RALS的专用标准,本标准建立了完整的评价体系,覆盖RALS四大核心模块,包括医生控制台、患者手术平台、影像处理平台及三维腹腔内窥镜(简称内窥镜)、手术器械。标准特别强调在测试过程中需重点关注对有效工作空间边缘点的性能检测、主从映射比例的准确性验证和器械操作杆插入深度的调节功能评估,本次解读的大部分条款中均有相关要求。
本标准首次建立了系统化的评价指标,为该类产品的上市与临床应用提供了规范化依据,为监管中的溯源工作提供了有力支撑。具体而言,标准明确了产品的核心考量要素,通过重新定义与归拢测试方法,使产品从设计研发到临床使用全流程均有标准可依。其突出价值体现在:
1 明确了生产与临床应用中的关键技术节点及风险控制点,为企业质量提升和医疗机构采购提供了明确参考,并降低了检验机构的方法研究时间成本;
2 实现了从部件到整体的全面评价,涵盖操作执行的准确性、重复性及“初操作-运动-成像-显示-再次操作”全链路延迟来源分析,契合产品生产、研发、注册、监管的全流程需求;
3 基于通用机器人标准,重点强化了部件与整体的安全性要求,聚焦碰撞保护、急停位移、速度限制、患者释放等安全保护功能,全面覆盖临床安全需求。引导制造商主动考虑临床相关风险,推动生产与使用环节的紧密衔接,强化全链条风险控制理念。
值得注意的是,本标准目前适用范围未包含单孔手术系统,局限于国际医用机器人领域发展规律,目前的标准化工作重心在于采用刚性结构机械臂的机器人系统,单孔内窥镜手术系统中常用的柔性机械臂的测试方法尚未达成统一。考虑到RALS技术快速迭代的特点,建议加强标准解读培训,统一评价方法及测试准则,并根据新产品的特性进行拓展;鼓励基于标准原则的创新产品测试方法探索;建立标准动态更新机制,使标准适应新的技术挑战和市场需要[19-20]。
5 小结
YY/T 1941-2024标准的发布与实施,标志着我国手术机器人标准化建设进入了新阶段。该标准不仅解决了腹腔内窥镜手术系统这类产品的检验需要,还有助于归纳和探索主从式手术机器人的共性问题,对于其他相似构型的机器人手术系统研发、上市及监管流程也具有重要的指导意义,为推动整个手术机器人领域的规范化发展提供了有力支撑。
参考文献
[1]樊书菠, 李学松. 国产康多内窥镜手术机器人系统在泌尿外科中的应用进展[J]. 中国微创外科杂志, 2023, 23(2): 140-143.
[2]刘勋, 芮碧宇, 张维军, 等. 骨科手术机器人故障分析及应对策略[J]. 协和医学杂志, 2023, 14(6): 1149-1154.
[3]肖月, 赵琨, 邱英鹏, 等. 内窥镜手术器械控制系统的应用现状[J]. 卫生经济研究, 2018, 35(6): 3-6.
[4]陈劲果, 王之仕, 朱礼乐, 等. 国产手术机器人在泌尿外科中的应用与展望[J]. 机器人外科学杂志(中英文), 2025, 6(6): 916-921.
[5]Xu L Q, Shen C, Li X F, et al. Feasibility and safety of dual-console telesurgery with the KangDuo Surgical Robot-1500 System using fifth-generation and wired networks: an animal experiment and sea-spanning clinical study[J]. Minerva Urol Nephrol, 2024, 76(2): 241-246.
[6]Bhandari M, Zeffiro T, Reddiboina M. Artificial intelligence and robotic surgery: current perspective and future directions[J]. Curr Opin Urol, 2020, 30(1): 48-54.
[7]丛戎, 邵云强, 田金勇, 等. 国产手术机器人辅助单孔腹腔镜技术在泌尿外科的初步应用[J]. 机器人外科学杂志(中英文), 2023, 4(6): 533-539.
[8]Mayor N, Coppola A S, Challacombe B. Past, present and future of surgical robotics[J]. Trends Urol Mens Health, 2022, 13(1): 7-10.
[9]De Cillis S, Geretto P, Phé V. Opening the horizons of functional urology and neurourology to robot-assisted surgery[J]. Eur Urol, 2023, 83(3): 189-190.
[10]郭涛, 马国栋, 张立静, 等. 国产腹腔内窥镜手术系统注册情况研究[C]//中国医学装备大会暨2025医学装备展览会会议论文集. 北京: 中国医学装备协会, 2025: 308-316.
[11]何骏, 李文, 柳晶波, 等. GB 9706.1-2020 医用电气设备第1部分:基本安全和基本性能的通用要求[S]. 北京,中国标准出版社,2020.
[12]何骏, 何超, 洪伟, 等. YY/T 1712-2021采用机器人技术的辅助手术设备和辅助手术系统[S]. 北京,中国标准出版社,2021.
[13]全国医用电器标准化技术委员会医用电子仪器标准化分技术委员会. 医用电气设备 第2-77部分: 采用机器人技术的辅助手术设备的基本安全和基本性能专用要求: YY 9706.277-2023[S]. 北京: 中国标准出版社, 2023.
[14]医用机器人标准化技术归口单位. 采用机器人技术的腹腔内窥镜手术系统: YY/T 1941-2024[S]. 北京: 中国标准出版社, 2024.
[15]张艳丽, 王权, 孟祥峰. 行业标准《采用机器人技术的医用电气设备术语、定义、分类》解析[J]. 中国医疗设备, 2025, 40(6): 7-10.
[16]唐桥虹, 孟祥峰, 王浩, 等. 行业标准《采用机器人技术的骨科手术导航设备要求及试验方法》解析[J]. 协和医学杂志, 2025, 16(4): 908-915.
[17]白儒, 张光永, 胡三元, 等. 腹腔镜手术机器人执行臂运动学建模分析[J]. 华北理工大学学报(自然科学版), 2025, 47(3): 43-49.
[18]张沁园, 颜青来, 钱文文, 等. 内窥镜手术器械力传递系数测试装置设计[J]. 中国医疗器械信息, 2020, 26(1): 29-30.
[19]赵体玉, 王维, 龚仁蓉, 等. 达芬奇机器人手术系统安全使用与维护专家共识[J]. 护理学杂志, 2023, 38(15): 51-55.
[20]邱英鹏, 肖月, 史黎炜, 等. 内窥镜手术器械控制系统辅助治疗的成本效果分析[J]. 卫生经济研究, 2018, 35(6): 13-14.
- 搜索
-
- 1000℃Nutrients:真实世界数据,纤维肌痛患者的饮食与运动自适应规律
- 1000℃D-二聚体升高诊治与管理专家共识(2026)
- 1000℃专家论坛|文良志:门静脉血栓的诊断和治疗
- 1000℃首例儿童NF2驱动型胸膜间皮瘤,多方法学检测锁定NF2双等位基因失活和14/22号染色体缺失,提示与成人胸膜间皮瘤不同
- 1000℃打破误区:干扰素追求CHB功能性治愈,HBsAg为何“不降反增”?
- 1000℃迷惑性极强的肝内病灶!影像表现疑点重重,最终病理竟查出两种不同肝脏恶性肿瘤
- 1000℃指南共识|原发性肝癌分子靶向药物相关蛋白尿中西医结合诊疗专家共识
- 1000℃Diabetologia:意大利北部社区 1~100 岁人群胰岛自身抗体与乳糜泻 TGA-IgA 的年龄分布及检测方法学验证
- 精J Child Psychol Psychiatry:12种罕见神经发育障碍儿童沟通能力谱系
- 精研究发现:爱吃辣的人,心血管病和癌症死亡风险都会显著降低
- 精Nursing in Critical Care:别再指责护士了!ICU 里被遗漏的护理,根源在系统而非个人
- 精Acta Obstet Gynecol Scand:罕见病女性的妊娠并发症与母婴结局,一项单中心434种罕见病的回顾性队列研究
- 精【爱儿小醉】儿科患者术前对流层臭氧暴露与围手术期呼吸系统不良事件之间的关系:一项单中心回顾性队列研究
- 精eBioMedicine:牙龈下微生物组与脑健康存在连续关联梯度,牙周炎或成认知衰退可干预靶点
- 精军事医学研究院《自然·通讯》:自适应IrPtCu纳米酶水凝胶实现耐药菌感染伤口序贯治疗
- 精能够逆转萎缩性胃炎的两个中成药,该怎么选择?
- 荐同时性多发性原发性肺癌,左右病灶分别为EGFR和ALK阳性,考虑淋巴结肿大仅局限左肺门及血浆EGFR阳性,采用奥希替尼联合化疗
- 荐40岁女性同时罹患卵巢支持细胞-间质细胞瘤和透明细胞乳头状肾肿瘤,WES等基因检测竟为阴性
- 荐椎管内麻醉使用止血药突发气道痉挛的抢救流程解析
- 荐女子肝区无任何不适,影像提示复杂囊性病变,层层鉴别后锁定罕见胆管源性囊性肿瘤
- 荐“绘”真报告 | 病理考虑为中枢神经细胞瘤,检出脑室外神经细胞瘤的特征性变异FGFR1-TACC1融合,辅助鉴别诊断
- 荐8岁女童出现男性化症状,竟是形似「性索-间质肿瘤」的卵巢「无性细胞瘤」所致,少见KRAS/CDK4共扩增或与侵袭性有关
- 荐17例病例分析揭示常见于中年人的色素性室管膜瘤临床特征与预后,分子检测可助力临床精准诊疗
- 荐Lancet Oncol:结直肠癌腹膜转移,围手术期化疗并非必选项
- 标签列表
-
- 星座 (702)
- 孩子 (526)
- 恋爱 (505)
- 婴儿车 (390)
- 宝宝 (328)
- 狮子座 (313)
- 金牛座 (313)
- 摩羯座 (302)
- 白羊座 (301)
- 天蝎座 (294)
- 巨蟹座 (289)
- 双子座 (289)
- 处女座 (285)
- 天秤座 (276)
- 双鱼座 (268)
- 婴儿 (265)
- 水瓶座 (260)
- 射手座 (239)
- 不完美妈妈 (173)
- 跳槽那些事儿 (168)
- baby (140)
- 女婴 (132)
- 生肖 (129)
- 女儿 (129)
- 民警 (127)
- 狮子 (105)
- NBA (101)
- 家长 (97)
- 怀孕 (95)
- 儿童 (93)
- 交警 (89)
- 孕妇 (77)
- 儿子 (75)
- Angelababy (74)
- 父母 (74)
- 幼儿园 (73)
- 医院 (69)
- 童车 (66)
- 女子 (60)
- 郑州 (58)